LÄÄNE-VIRU RAKENDUSKÕRGKOOL Ettevõtluse ja majandusarvestuse õppetool MK Jan Pikhof AUTOHOOLDUSVAHENDID Referaat Õppejõud: Liina Maasik Lähijuhendaja: Ergo Petermann Mõdriku 2011 SISUKORD Sissejuhatus...................................................................................................................... 4 1.1 Salongi hooldamine.................................................................................................5 1.1.1 Autoglym Autofresh õhuvärskendaja .............................................................6 1.1.2 Autoglym Car Interior Shampoo......................................................................6 1.1.3 Loctite Hygiene Spray .....................................................................................6 1.1.4 Sonax Autosal
Tartu Kutsehariduskeskus Kergetööstus ja ilu osakond, ILU10 Merilin Susi Erinevate firmade keemiliseloki vedelikud Iseseisevtöö Juhendaja Merike Rosenthal Tartu 2010 SISUKORD SISSEJUHATUS Autor on kogunud kokku suure hulga lokivedelikke, kinniteid ning eel-, vahe- ning järeltöötlus aineid. Töös on esitletud 10 tuntumat firmat ning nende tooted. Osadel toodetel on juures kasutusjuhendid, aga igale tootele pole Internetis ligipääsu kasutusjuhenditele ning koostistele. 1. ESTEL 2. Kinniti 3. Wavex · Kinniti 1:1 (25 ml +25ml sooja vett) · pH 2-3 · Mõjuaeg 5(7) +5 min 4. Niagara · Kinniti 1:1 (25 ml +25ml sooja vett) · 1000 ml · pH 2-3 · Mõjuaeg 5(7) +5 min 5. Lokivedelik 1.2.1 Wavex · Leeliseline lokivedelik · pH 8,1- 9,6 ·
TALLINNA TEHNIKAÜLIKOOL Informaatikainstituut Infosüsteemide õppetool Projekt aines IDU5360 "Kontseptuaalne süsteemianalüüs" e-deklaratsioonide haldamine Üliõpilane: ... Õpperühm: ... Matrikli nr.: ... Juhendaja: ... Tallinn 2011 2 Autorideklaratsioon Deklareerin, et käesolev ainetöö on minu töö tulemus ja seda ei ole kellegi teise poolt varem üheski aines esitatud. ............................. ................................ (kuupäev) (töö esitaja allkiri) 3
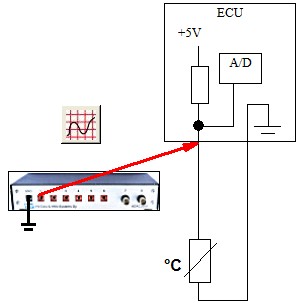
kütuse sissepritse süsteemi või millal tekitada sädelahendus silindrisse. Joonis 1.1 Mootori juhtaju sisemus[2] 6 1.2 Küttesegu kontrollimine anduritega Üks kõige tähtsamatest autoaju ülesannetest on kahtlemata mootori varustamine kvaliteetse kütteseguga. Õige kütusesegu konsistens ja kogus on ühtlaselt töötava mootori eelduseks. Autoaju roll ongi selles, et erinevate andurite ja süsteemide abil tagada mootorile kvaliteetne segu. Aju kasutab kütuse segu kontrolliks vähemalt viite andurit. Lambda () andur, mis asetseb väljalaske torustikus mõõdab hapniku sisaldust heitgaasides. Vastavalt mida rikkam segu on(kütust on rohkem kui õhku), seda rohkem antakse mootrile õhku või vastupidi vähendatakse kütuse kogust. Külma mootori korral on segu rikkam, kuna soodustab tõhusamat külmkäivitust. Kohe peale mootori käivitumist peab
Traditsiooniline hiir kujutab endast väikest nuppudega varustatud karbikest, mis on juhtme abil arvutiga ühendatud ja mille sisemuses pöörleb väike kummist või plastist kuulike. Kui hiirt libistada laual (alusmatil), siis kuul pöörleb ja tema liikumisele reageerivad kaks rullikut, mis on ühendatud kahe teineteisest 90o võrra pööratud anduriga, mis kuulikese pöördliikumise teisendavad 5 elektrilisteks impulssideks. Need elektrilised signaalid vastavad eraldi liikumisele kahes suunas: edasi- tagasi ja vasakule- paremale. Kursor arvuti ekraanil järgib hiire liikumist aluslaual. Anduriteks on tavaliselt piludega kettakesed, mis pöörlevad hiire kuulikese liikudes ning katkestavad kettakesi läbivat valgusvoolu; neid katkestusi registreerivad fotoandurid. Piludega kettakeste asemel võib kettakeste pind olla kaetud musta- valgetriibulise mustriga: sel juhul registreeritakse fotoanduritega valgete pindade pealt peegelduvat valgust
I.1.Mehhaanika 1.1.Kinemaatika 1.1.1.Inertsiaalne taustsüsteem Liikumise kirjeldamine peab toimuma ajas ja ruumis.Ruumis määratakse keha asukoht taustsüsteemi suhtes.Taustsüsteemis kehtib Newtoni 1 seadus.Iga taustsüsteemi,mis liigub inertsiaalse suhtes ühtlaselt ja sirgjooneliselt,nimetatakse samuti inertsiaalseks. Üleminek ühest inertsiaalsest süsteemist teisesse: Galillei teisendus: keha koordinaate arvestades,et aeg külgeb mõlemas süsteemis ühtemoodi. x=x'+V0*t x-I süsteem y=y' x'-II süsteem z=z' t=t' Keha kiirus on esimeses süsteemis: V=V'+V0 Dünaamika võrrandid ei muutu üleminekul Ist inertsiaalsest taustsüsteemist teisesse,see tähendab,et nad on invariantsed koordinaatide teisenduste suhtes. 1.1.2.Ühtlane sirgliikumine Keha liikumise tegelik tee on trajektoor. Nihkvektoriks s¯ nimetame keha liikumise trajektoori alg-ja lõpppunkti ühendavat vektorit.Olgu nihe S¯ ajavahemikku t jooksul,s
Rakvere Ametikool Egert Moones Tisleri eriala AKNALENG Lõputöö Juhendaja: Riho Mäe Rakvere 2009 Rakvere Ametikool Egert Moones Sisukord Sisukord............................................................................................................................ Sissejuhatus...................................................................................................................... Konstruktsiooni kirjeldus................................................................................................. Spetsifikatsioon................................................................................................................ Materjalide kulu ja maksumus......................................................................................... Tehnoloogilise protsessi skeem..............................................
I.1.Mehhaanika 1.1.Kinemaatika 1.1.1.Inertsiaalne taustsüsteem Liikumise kirjeldamine peab toimuma ajas ja ruumis.Ruumis määratakse keha asukoht taustsüsteemi suhtes.Taustsüsteemis kehtib Newtoni 1 seadus.Iga taustsüsteemi,mis liigub inertsiaalse suhtes ühtlaselt ja sirgjooneliselt,nimetatakse samuti inertsiaalseks. Üleminek ühest inertsiaalsest süsteemist teisesse: Galillei teisendus: keha koordinaate arvestades,et aeg külgeb mõlemas süsteemis ühtemoodi. x=x'+V0*t xI süsteem y=y' x'II süsteem z=z' t=t' Keha kiirus on esimeses süsteemis: V=V'+V0 Dünaamika võrrandid ei muutu üleminekul Ist inertsiaalsest taustsüsteemist teisesse,see tähendab,et nad on invariantsed koordinaatide teisenduste suhtes. 1.1.2.Ühtlane sirgliikumine Keha liikumise tegelik tee on trajektoor. Nihkvektoriks s nimetame keha liikumise trajektoori algja lõpppunkti ühendav







































Kõik kommentaarid