6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi- pöörlemissagedus nn = 1000 min-1, ankruahela takistus (ankru- ja lisapooluste mähised) Ra = 0,2 ja ankruahelasse on lülitatu...
PROJEKTÜLESANNE „HOIDIK“ Õppeaines: RAKISTE PROJEKTEERIMINE + PROJEKT Mehaanikateaduskond Esitamiskuupäev:.................... Üliõpilase allkiri:.................... Õppejõu allkiri:.................... Tallinn 2017 SISUKORD SISSEJUHATUS ..................................................................................................................................2 TOORIK, TÖÖPINK ...................................................................................................................3 Tooriku andmed ...................................................................................................................3 Tööpingi valik ja parameetrite kirjeldus ................................................................................
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKINSTITUUT MHD0030 MASINAMEHAANIKA KODUTÖÖ NR. 3 Mitme-astmeline hammasmehhanism ÜLIÕPILANE: KOOD: Töö esitatud: Arvestatud: Parandada: TALLINN 2015 Lähteandmed: Mehhanismi ülekande suhe u = 205 Mootori pöördemoment M = 19,8 Nm ja pöörlemissagedus n = 1455 min-1 Ülekantav võimsus P = 3,0 kW. Arvutada mehhanismi vajalik ülekandeastmete arv ning väljundvõlli pöördemoment ja pöörlemissagedus. Leida viimase hammaspaari diameetrid ja laiused. 1. Mehhanismi ülekandeastmete arv Hammasülekande soovituslik ülekandesuhe on kuni 10. Mehhanismi ülekandesuhe arvutatakse valemiga u=u 1 ∙ u2 ∙ … ∙u n kus ui – ühe astme ülekandesuhe. Kui mehhanismis oleks kaks ülekandeasted, siis keskmine ülekandesuhe on ui= √u=√205 ≈ 14,3 See on liiga suur arv ja vaatleme kolmeastmeline mehhanism. ...
1. Kirjeldage esiveolise auto jõuülekande skeemi, selle kasutatavus, näited. Esisillaveoga auto jõuülekande skeem: Esisillavedu on väga laialdaselt levinud ja seda lahendust kasutavad enamus autotootjad. Erinev on BMW, kes ei tooda esisillaveoga autosid. Kaasaegsetel esisillaveoga autol on peaülekanne käigukasti korpuses. 2. Astmelised käigukastid, nende eelised Astmelised ehk hammasrattaskäigukastid jagunevad liht- ja planetaarkäigukastideks. Autodel on põhiliselt kasutusel astmelised lihtkäigukastid, mille käikude lülitamine toimub kas hammasrataste või muhvide nihutamisel. Vähesed autod omavad varjaator käigukasti. Nende ülekannet muudetakse sujuvalt kiirenevalt ja need autod sõidavad mõlemat pidi sama kiiresti. Käigukast peab töötama vaikselt ja vähese kuluvus astmega. Seepärast kasutataksegi kaldhammastega hammasrattaid. 3. Siduri töötamine Siduri töötamine põhineb kokkupuutuvate ja liikuvate pindade vahel tekkiva hõõrde...
Andurite signaalid 1.1 Pöörlemissagedus andurid 1.1.1 Indiksioonandur 1.1.2 Halli andur 1.1.3 Optiline pöörlemissagedusandur 1.1.4 Keeleandur 1.1.5 Magnetotakistiga pöörlemissagedus andur (MRE) 1.2 Rõhk 1.2.1 Rõhulüliti 1.3 Rõhuandur 1.4 Kiirendus või vibratsioon 1.4.1 Detonatsiooniandur 1.5 Õhumõõturid 1.5.1 Labatüüpi õhuvoolumõõtur 1.5.2 Kuumtraat- (kuumkile-) õhumõõtur 1.5.3 Karmani keerisõhumõõtur 1.6 Temperatuur 1.6.1 Termolüliti 1.6.2 Termistor 1.7 Heitgaasi hapnikuandurid 1.7.1 Tsirkooniumandur
Auto juhitavus ja ABS pidurid Kaido Tammepõld Lühendid ABS blokeerumisvastased pidurid ASR kaapimisvastane süsteem EBV elektrooniline pidurdusjõu kontroll EDS elektrooniline diferentsiaali kontroll ESP elektrooniline stabiilsuse kontroll MSR mootori pidurdusmomendi reguleering Auto juhitavus ja ratta haardumine Auto liikumissuuna või kiiruse muutumine, pidurdamine, kiirendamine või pööramine sõltub ratta ja maapinna vahelisest haardumisest Haardejõu ületamisel hakkab ratas libisema Auto juhitavus ja ratta haardumine Rehvi ja maapinna vaheline haardejõud koosneb külgsuunalisest ja pikisuunalisest haardejõust Nende jõudude summa on teatud kindla suurusega Ühe suurenedes teine ...
ProDiags ABS, ASR, EBV, EDS, ESP, MSR Piduri, veojõu ja stabiilsuse kontrollsüsteemid http://open.forms.fi/hmv-edu http://www.hmv-systems.fi ProDiags Sisukord 1. ABS - pidurid .......................................................................3 2. EDS Elektrooniline diferentsiaali kontroll ............................9 3. EBV Elektrooniline pidurdusjõu kontroll ............................11 4. ESP Elektrooniline stabiilsuse kontroll ..........................................12 5. Lülitid ja andurid ......................................................................14 5.1. ASR/ESP lüliti ......................................................................14 5.2. Pidurite lülitid .........................................................................
ProDiags Automaatkäigukastid Arvutiprogrammi ülesanded Õpetaja variant http://open.forms.fi/hmv-edu http://www.hmv-systems.fi 2 1. Üldist Automaatkäigukastide liigid Automaatkäigukastid muudavad ülekandearvu ehk käike, nagu nimigi ütleb, automaatselt, ilma autojuhi sekkumiseta. Tänapäeva automaatkäigukaste võib jaotada kolme rühma: · astmeteta ehk CVT variaatorkastid · elektromehaanilise käiguvahetusega käigukastid · hüdraulilise käiguvahetusega ja planetaarülekandega käigukastid Automaatkäigukastide eeliseks on nende kasutamise mugavus ja suurem sõiduohutus. Autojuht väsib vähem ja ülekandearv muutub koos sõidutingimustega. Hüdrotrafo väldib mootori ja jõuülekande ülekoormamise. Automaatkäigukastide puuduseks võib pidada sidurite läbilibisemisest ja lisandunud elektrienergija vajadusest tingitud v...
Kodune töö Õppeaines : Sisepõlemis mootorid Teaduskond: Transpordi teaduskond Õpperühm: AT 31/B Üliõpilane: Roland Oja Juhendaja: A. Lukk Tallinn 2012 ÜLESANNE1. Lähte ülesanne. Arvutada oma auto sisselaskesüsteemis voolukiirus drosseli korpuses selle 100% avatuse korral iga 500 p/min tagant, alates tühikäigust. Auto andmed. Honda Acord 2354cc 189hp(140Kw)@6800rpm 223Nm@4500rpm Drosselklapi läbimõõt on 62mm, seega ristlõike pindala on 0,01276m2 Mootori töömaht on 2354cm3, seega ühe silindri ruumala on 588cm3. Täiteaste on 1. Kasutatud valem. n Q N TA vsl = 2 60 A vsl sisselaske voolukiirus(m/s) n silindrite arv kanali kohta N pöörlemissagedus(p/min) TA täiteaste Q silindri ruumala(m3) A drosseli ristlõikepindala (m2) Arvutus tulemused tabelina. rpm 1000 1500 2000 2500 3000 3500 4000 4500 5000 ...
Kordamisküsimused 10 kl. füüsika 5.kt PERIOODILISED LIIKUMISED. Tean: · mõisteid: ringliikumine-liikumine, mis toimub mööda ringjoonelist trajektoori NT VAATERATAS tiirlemine(keerlemine)-toimub juhul, kui keha mõõtmed ja kuju pole liikumise kirjeldamisel olulised NT KELLAOSUTI TIPP pöörlemine-kui keha erinevad punktid tiirlevad sama keskpunkti ümber erinevate raadiustega ringjooni NT AUTORATAS, MAA ÜMBER OMA TELJE kõverusraadius- pöördenurk-nurk, mille võrra pöörub ringliikumisel keha asukohta ja trajektoori kõveruskeskpunkti ühendav raadius nurkkiirus-võrdne ajaühikus sooritatava pöördenurgaga, joonkiirus-kirjeldab igasugust liikumist, kesktõmbekiirendus-suunamuutusest tingitud kiirendus, mis on suunatud alati keha trajektoori kõveruskeskpunkti poole ja on seega kiirusvektoriga risti, võnkumine-keha liigub edasi-tagasi ühte trajektoori mööda, vabavõnkumine-süsteemi sisejõudude mõjul toimuv võnkumine, ...
Käivitussüsteem P=U*I ; I=P/U Pingelang jadaühenduse korral U=I*R I=U/R R=U/I · Selleks, et mootor käivituks peab väntvõlli pöörlemissagedus olema piisavalt suur. · Diiselmootori käivitamiseks peab temepratuur silindris ületama diiselkütuse isesüttimistepiiri. · Bensiinimootorites süüdatakse aurustunud bensiin elektrisädemetega, bensiini aurustumiseks aga vajatakse soojust. · Mootori käivitumiseks peab olema väntvõlli pöörlemissagedus bensiinimootritel vähemalt 60-120 1/min ja otsepritediislitel 100 1/min. Käiviti osad ja ehitus Ankur, ankurvõlli lintkeere, hammasratas, harjad, ergutusmähis, kollektor, peavooluklemmid, klemmipoldid, kontaktketas, tagastusvedru, hoidemähis, kere, tõmberelee, lülitushark, vabakäigusidur, tõmbemähis. · Ankru paneb pöörlema käiviti keres asuvatues mähistes tekkiv magnetväli · Tõmberelee viib käiviti hammasr...
Leo Nirgi : Tuled (käivitussüsteem) Elektrotehnika 1) Selleks,et mootor käivituks peab väntvõlli pöörlemissagedus olema piisavalt suur. 2) Diiselmootori käivitumiseks peab temperatuur silindris ületama diiselkütuse isesüttimistemperatuuri. 3) Bensiinimootorites süüdatakse aurustunud bensiin elektrisädemega. Bensiini aurustamiseks aga vajatakse soojust. 4) Mootori käivitumiseks peab olema väntvõlli pöörlemissagedus bensiinimootoritel vähemalt 60-120 1/min ja otsepritsediislitel 100 1/min. 5) Käivitite võimsused on 0,3.....10KW. Käiviti ehitus : - Ankur ja ankurmähis (ankrut kujutatakse joonisel M ) - Harjad ( kommutaatoril libisevate harjade kaudu juhitakse vool ankurmähisesse. Ühe harja kaudu kulgeb vool akust mähisesse ja teise kaudu mähisest maandusesse) - Vabakäigusidru hammasrattaga kantakse ankru pöörlemine mootorilt hoorattale - Ankru paneb pöörlema ergutumähis ( ergutus...
Turbokompressoriteareng Sisukord 1.Üle- ja turbolaadimine 2.Turbolaaduri tõhususe tõstmise teed 3.Heitgaaside möödavooluklapiga varustatud turbolaadur 4.Muutuva turbiinigeomeetriaga VTG turbolaadur 5.Muutuva siiberturbiiniga VST turbolaadur Üle- ja turbolaadimine Gaasijaotusmehhanismi ülesanne on realiseerida mootori gaasivahetusprotsessi. Seetõttu tuleb GJM-i ehituse juures käsitleda ka ülelaadurite ehitust ja nende tööprintsiipe. Ülelaadurid jagunevad õhulaaduriteks ja turbokompressoriteks. Õhulaadureid on väga erineva ehitusega. Üldjuhul on standardmootorite ülelaadurite poolt arendatav ülerõhk ca 2 bar. Forsseeritud mootoritel kasutatakse sisseimetava õhu vahejahutust. Suure tootlikkusega turbokompressorid omavad eriliiki turbiini juhtimissüsteeme, mille ehitust käsitletakse alljärgnevas. Diiselmootori heitgaasid sisaldavad suures koguses lämmastikoksiidi, mis tuleneb põlemisprotsessi kõrgest rõhust põlemiskambris. ...
7. Kordamisküsimused. Kivimaterjalide purustus-, sorteerimis- ja rikastusseadmed. 1. Kivimaterjali töötlemise protsessid lähtuvalt lõpptulemusest, purustusaste, arvutused. Kivimaterjali töötlemise lõpptulemusest lähtuvalt eristatakse kahte protsessi: a) purustamine, mille lõpp-produktiks on erinevate terasuurustega killustik b) jahvatamine, mille lõpp-produktiks on erinevate osakeste mõõtmetega mineraalne pulber (teatud ka kui filler). Mõlemad protsessid jaotuvad veel lähtematerjali tera keskmise mõõdu ja produkti tera keskmise mõõdu suhte alusel, mida purustusastmeks kutsutakse ja arvutatakse seosega: C=Dk/dk, kus Dk-lähtematerjali tera keskmine mõõt ja dk-produkti tera keskmine mõõt. Lähtematerjali terade keskmine mõõt määratakse kas või kus a,b,c on materjali tüki mõõtmed kolmes ristsuunas – pikkus, laius, paksus. Kui tegemist on väikesetükilise segumaterjaliga või töötlemise produktiga tuleb tera keskmine ...
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHE0050 PÕHIÕPPE PROJEKT ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: IGOR PENKOV TALLINN 2015 Üliõpilane Mattias Liht Üliõpilaskood 134578 MHE0050 – PÕHIÕPPE PROJEKT PROJEKTÜLESANNE 1. Projekteerida elektriajamiga vints. 2. Prototüüp: Vints koosneb järgnevatest põhielementidest: - mootorreduktor - raam - trummel - laagerdus - reduktori ja trumli ühenduselemendid - lüliti ja juhtimispult 3. Tehnilised karakteristikud Trossi kandevõime (kg) valida vastavalt üliõpilaskoodi viimasele numbrile A m = 1100 kg Trossi liikumiskiirus (m/s) valida vastavalt üliõpilaskoodi eelviimasele numbrile B v = 0,15 m/s - lasti käiguulatus, m ...
Põltsamaa Ametikool Piduri veojõu ja juhitavuse korrektorid A3 Alvar Müür Kaarlimõisa 2010 1. ABS- Anti- lock breaking system ( Blokeerumatud pidurid) Juhitavuse halvenemine on tingitud libiseva ratta külgsuunalise hõõrdejõu vähenemisest. Blokeerunud rattal on külgsuunaline hõõrdejõud nullilähedane. ABS-i olulisemad osad on hüdrosõlm, juhtplokk ja autorataste juures asuvad pöörelemissagedusandurid. Juhtplokk võrdleb pöörlemissagedus-anduritelt saadud signaale. Kui ühe ratta pöörlemissagedus väheneb teistest kiiremini (see tähendab blokeerumisohtu), siis hakkab juhtplokk hüdrosõlmes asuvate elektromagnet-klappide abil pidurdusrõhku vähendama. Rõhku vähendadakse seni kuni pöörlemissagedus hakkab uuesti suurenema. Seejärel suurendatakse pidurdusrõhku kuni blokeerumise ohu tekkimiseni, ning kõik kordub. Joonis 1. ABS Skeem 1.2 ABS- i tööpiirkond Juhtplokk jä...
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: Kert Kerem KOOD: 082657 JUHENDAJA: Igor Penkov TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT PÕHIÕPPE PROJEKT MHX0020 Projekteerida elektriajamiga vints. Tõstetav mass m = 600 kg Maksimaalne liikumiskiirus v = 0,06 m/s Maksimaalne liikumiskiirus l = 400 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detaili joonised Joonis esitada formaadil A2 A4 Töö välja antud: 04.02.2010.a. Esitamise tähtpäev: 20.05.2010.a. Töö väljaandja: I.Penkov 1. Projekteerimise objekt ja lähted Projekteerimiseks on esitatud elektriajamiga vints kandevõimeg...
Mehhanosüsteemide komponentide õppetool Kodutöö nr 1 õppeaines TUGEVUSÕPETUS II (MHE0012) Variant Töö nimetus A B Võlli tugevusarvutus painde ja väände koosmõjule 3 5 Üliõpilane Üliõpilaskood Esitamise kuupäev Õppejõud 2015 Ühtlasele võllile on paigaldatud kaks rihmaratast. Võlliga ülekantav F1 Väiksem rihmaratas, efektiivläbimõõt D1 võimsus on P = 5,5 kW. Väiksema rihmaratta efektiivläbimõõt on D1 = 140 mm. ...
*** Referaat Kolmefaasiline asünkroonmootor *** 12. klass *** 2010 Asünkroonmootorist Asünkroonmootor on vahelduvvoolu jõul töötav elektrimootor, mille pöörlemissagedus ei ole sünkroonne elektrivoolu sagedusega. Nimetus tuleneb sellest, et ta pöörleb elektrivoolu sageduse ja poolusepaaride arvu alusel arvutatavast kiirusest veidi väiksema kiirusega ehk mitte sünkroonselt. Koormuse suurenedes asünkronmootori kiirus väheneb ja ta võtab automaatselt, ilma mingi regulaatori abita, võrgust tugevamat voolu, et taastada normaalne pöörlemissagedus. Üldlevinud on lühisrootoriga asünkroonmootorid, mille rootori mähised on omavahel ühendatud - lühises. Toodetakse ka faasirootoriga asünkroonmootoreid, mille rootorimähis on kontaktrõngaste ja harjade abil ühendatud vooluvõrku. Joon.1 Asünkroo...
Automaatkäigukasti hüdraulika Rõhuregulaator koosneb klapist, reguleeritavast vedrust ja ühenduskanalitest. Klapi liigutamisega muudetakse õli pealevoolukanali läbilaskevõimet, millest omakorda sõltub rõhk väljuvas kanalis. Rõhku saab muuta vedru all oleva reguleerkruviga. Rõhuregulaatoreid kasutatakse näiteks pumbast hüdrotrafosse suunduva rõhu (u. 6 bar) ja juhtrõhu reguleerimiseks (u. 3 bar). Erinevusrõhuõhuregulaator Erinevusrõhu regulaatorid hoiavad siseneva ja väljuva rõhu vahe muutumatuna (n. 1 bar). Ehituselt ja tööpõhimõttelt sarnaneb ta rõhuregulaatoriga. Põhierinevus on klapi juhtimises. Klapi ühele poolele mõjub regulaatorisse sisenev rõhk ja teisele poolele väljuv rõhk koos vedruga. Erinevusrõhu regulaatoreid võidakse kasutada ka näiteks kahesuunalise juhtimisega regulaatorites. Töörõhu reguleerimine Käigukasti sidureid ja pidureid kokku suruvat rõhku nimetatakse töörõhuks ja tähistatakse lühendiga PL. Klappi...
Jahutussüsteemi ülesandeks on mootori detailide jahutamine ja nende töötemperatuuride hoidmine 85-95 kraadi juures ning kokpiti soojendamine. Mootorid omavad põhiliselt kahte tüüpi jahutussüsteeme: a) õhkjahutusega, b) vedelikjahutusega. Õhkjahutusega mootorite silindrite ribisid jahutab suurendatud õhuvoo kiirus. See saadakse summaarse õhuvoona propelleri või siis maapealsetel sõidukitel mootori ventilaatori poolt. Õhkjahutusega mootorite konstruktsioonis on oluline osa eri liiki õhusuunurite olemasolul. Vedelikjahutussüsteemi osadeks on veepump, mootori jahutussärk, radiaator, termostaat ja ventilaator. Jahutussüsteemi käivitamine tarbib 3...4 % mootori võimsusest. Vedelikjahutussüsteemi ehitus ja kasutamine Mõlemat tüüpi jahutussüsteemil oluline osa mootori soojusest eemaldatakse konvektiivse soojusvahetuse teel, st keskkonna ja mootoriploki omavahelisel soojuse edasikandumisel. Teise maailmasõja ajal oli kasutusel lennuk...
ÜLESANDED PUMBAD JA VENTILAATORID Ülesanne 1 , imemiskõrgus 5,5m ja toru läbimõõt 100mm. Lähteandmed: Leida: Valemid: kus Lahendus: Ülesanne 2 , imemiskõrgus 5,5m, toru läbimõõt 100mm, imemistoru pikkus 10m, =0,025, sõela takistustegur , põlve takistustegur Lähteandmed: L=10m =0,025 Leida: Valemid: kus Lahendus: Ülesanne 3 , imemiskõrgus 7,5m, toru läbimõõt 150mm, imemistoru pikkus 10m, =0,05, sõela takistustegur , põlve takistustegur , rõhk vee pinnal 200kPa. Lähteandmed: => L = 10m = 0,05 = 200kPa = 1 000 kg/ Leida: Valemid: Lahendus: Et pumbas ei tekiks kavitatsiooni (nähtus, kus ve...
Mehaanikateaduskond Eriõppe projekt MEX0030 Töö autor: Juhendaja: Tallinn 2015 Sisukord Sisukord......................................................................................................................................2 1.Marsruuttehnoloogiad..............................................................................................................3 1.1.Võll....................................................................................................................................3 1.2.Ellips.................................................................................................................................5 1.3.Plaat...................................................................................................................................9 2.Lõikerežiimid.............................................................
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: KOOD: KAKB JUHENDAJA: IGOR PENKOV TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MASINATEHNIKA PROJEKT MHE0062 Projekteerida elektriajamiga vints. Tõstetav mass m= 800 kg Maksimaalne liikumiskiirus v = 0,1 m/s Trumli pikkus l = 320 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detailide joonised Joonis esitada formaadil A2-A4 Töö välja antud: 05.02.2010.a. ...
TTÜ KURESSAARE KOLLEDZ KODUTÖÖ nr. 1 Tehniline joonis ja kinemaatikaskeem Juhendaja: emeriitprofessor Maido Ajaots Kuressaare 2012 ÜLEKANDETEGURITE ARVUTUSED Mootori pöörlemissagedus n1 = 2000 p/min. Leian esimese hammasrattapaari ülekandeteguri. Valin Z1 = 19, Z2 = 57. i1,2 = Z2 / Z1 i1,2 = 57 / 19 = 3 Leian teise hammasrattapaari ülekandeteguri. Z3 = 18, Z4 = 81. i3,4 = Z4 / Z3 i3,4 = 81 / 18 = 4,5 Leian reduktori ülekandeteguri. ireduktor = 3 x 4,5 = 13,5 Leian reduktori väljundvõlli pöörlemissageduse. n2 = 2000 / 13,5 148 p/min Kinemaatikaskeem esitatud selel 1. Sele 1. Reduktori kinemaatikaskeem 2 3
Kodutöö nr 4 õppeaines TUGEVUSÕPETUS (MES0240) Variant Töö nimetus A B Võlli tugevusarvutus painde ja väände koosmõjule 7 2 Üliõpilane Üliõpilaskood Esitamise kuupäev Õppejõud Franz Mathias Ints 193527EANB 26.11.2020 Priit Põdra Ühtlasele võllile on paigaldatud kaks rihmaratast. Võlliga ülekantav võimsus on P = 5,5 kW. Väiksema rihmaratta efektiivläbimõõt on D1 = 140 mm. Arvutada ühtlase võlli läbimõõt, kui see valmistatakse terasest E335 (voolepiir tõmbel y = 325 MPa) ja varuteguri nõutav väärtus on [S] = 5. Pingekontsentraatorite ja väsimuse mõju on arvesse võet...
Impulsi jäävuse seadus - väliste mõjude puudumisel on süsteemi koguimpulss sinna kuuluvate kehade igasugusel vastastikmõjul jääv [m 1v1 - m2v2 = m1v1 ' + m2v2 '] Elastne põrge - kehad jäävad pärast põrget lahku Mitteelastne põrge - kehad jäävad kokku Gaasi rõhk tekib molekuli põrgetest vastu anuma seina Kontsentratsioon - osakeste arv ruumalaühikus [m -3] F = 1/3 m0 n S deltat v2 Rõhk [1/3 m0 n v-2] - molekulaarkineetilise energia põhivõrrand Reaktiivliikumine - liikumine, mille tekitab kehast eemale paiskuv kehaosa Hõõrdejõud/takistusjõud - jõud, mis takistab keha liikumist või liikuma hakkamist, hõõrdejõud on vastupidine keha liikumise suunale Seisuhõõrdejõud - suurem, kui liugehõõrdejõud [F h = -F] Liugehõõrdejõud [Fh = müü * N; N = mg] Veerehõõrdejõud - tunduvalt väiksem, kui liugehõõrdejõud. Tehnikas üritatakse minna liugehõõrdejõult veerehõõrdejõule (laagrite kasutamine) Vedelikhõõre - takistusjõud on hästi suur, aga seisuhõõrde...
EESTI MAAÜLIKOOL Tehnikainstituut Madis Vitsut RIPPVAGONETI ELEKTRIAJAM Kursuseprojekt õppeaines „Tehnoloogiaseadmete elektriajamid” TE.0023 Energiakasutuse eriala EK MAG II Üliõpilane: “ “ 2016. a. ………… Madis Vitsut Juhendaja: “ “ “ 2016. a. ………… lektor Erkki Jõgi Tartu 2016 SISUKORD TÄHISED JA LÜHENDID ........................................................................................................ 3 SISSEJUHATUS ........................................................................................................................ 5 1. TEHNOLOOGIA KIRJELDUS ......................
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: ....... KOOD: ........ JUHENDAJA: I. Penkov TALLINN 2007 1. Ajami kinemaatiline skeem 2. Trossi valik ja trumli läbimõõdu arvutus Tugevustingimus Maksimaalne pingutusjõud Fmax = m g = 450 * 9,81 4415 N . Varutegur [S] = 5 [6]. Pidades silmas trossi keeramist ainult trumlil (mitte alt olevate trossi keerdude peal) valime tross TEK 21610 [7], mille Ft = 59,5 kN Siis Trossi mõõt d = 10 mm. Siis trumli läbimõõt kus e = 20 Valime D = 200 mm reast 160; 200; 250; 320; 400; 450; 560; 630; 710; 800; 900; 1000 mm 3. Mootorreduktori valik Trumli pöörlemiseks vajalik võimsus kus T pöördemoment, Nm; T - nurkkiirus, rad/s. Pöördemoment kus F - tõstejõud. Fmax = m g = 450 * 9,81 4415 N Kus g 9,81 m/s raskuskiirendus; ...
Küsimused: osa 11. Teljed ja võllid 1. Mis on võlli ja telje põhiülesandeks masinates? Mis vahe on teljel ja võllil? Tuua näiteid võllidest ja telgedest. Telg/võll on detail, mis kannab masina ( või muu tarindi) pöörlevaid osi ning määratleb nende osade geomeetrilise pöörlemistelje. Telg on määratud vaid pöörlevate detailide toetamiseks( töötab ainult paindele). Võll on määratud pöörlevate osade toetamiseks ja pöördemomendi ülekandmiseks( töötab väändele ja paindele). 2. Kuidas liigitatakse võlle ja telgi? Tuua näiteid. Telgi liigitatakse: paigalseisvad-teljele paigaldatud detailid pöörlevad telje suhtes. Pöörlevad-telg pöörleb koos sellele paigaldatud detailidega(auto esiratta telg). Võlle liigitatakse: Sirged võllid, paindvõllid(kõverad võllid), väntvõllid, täisvõllid, õõnesvõllid. 3. M...
Põltsamaa Ametikool Automaatkäigukastid A3 Alvar Müür Kaarlimõisa 2010 1. Ülevaade automaatkäigukastidest 1.1Automaatkäigukastide liigid Automaatkäigukastid muudavad ülekandearvu ehk käike, nagu nimigi ütleb, automaatselt, ilma autojuhi sekkumiseta. Tänapäeva automaatkäigukaste võib jaotada kolme rühma: a) astmeteta, ehk CVT variaatorkastid; b) elektromehaanilise käiguvahetusega käigukastid; c) hüdraulilise käiguvahetuse ja planetaarülekannetega käigukastid. Automaatkäigukastide eeliseks on nende kasutamise mugavus ja suurem sõiduohutus. Autojuht väsib vähem ja ülekandearv muutub koos sõidutingimustega. Hüdrotrafo väldib mootori ja jõuülekande ülekoormamise. Automaatkäigukastide puuduseks võib pidada sidurite läbilibisemisest ja lisandunud elektrienergia vajadusest tin...
MHE0042 MASINAELEMENDID II Kodutöö nr. 4 Variant nr. Töö nimetus: Kettülekanne A -4 B -2 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: A.Sivitski Töö esitatud: Töö parandada: Arvestatud: 22.05.2014 d2 M d1 T KETTÜLEKANNE 1. Projekteerida rihm- või kettülekanne. Kui õppekoodi viimane number A on paarisarv – projekteerida rihmülekanne, kui A on paaritu arv – projekteerida kettülekanne. Lähteandmed valida tabelist õppekoodi viimase A ja eelviimase B numbrite järgi. A 0 1 ...
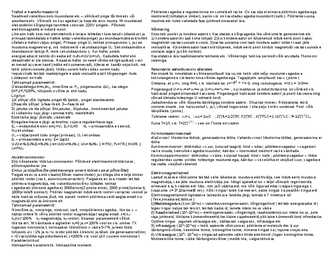
Valgamaa Kutseõppekeskus AT-14 Andri Põldsepp S Ü Ü TES Ü S TEEM ID E V Õ R D LU S JA A N A LÜ Ü S Kasutusel olevad süütesüsteemide võrdlus: Transistorsüütesüsteem Elektrooniline süütesüsteem Digitaalne süütesüsteem Eriom adused Transistorsüütesüsteem: Vaakumregulaatoriga süütejaotur, süüteandur jaoturis Elektrooniline süütesüsteem: Süütejaotur ilma vaakumregulaatorita Digitaalne süütesüsteem: Ühesilindripool; Kahesilindripool Süütepooliliik Transistorsüütesüsteem: Silindriline Elektrooniline süütesüsteem: Silindriline Digitaalne süütesüsteem: Ühesilindripool; Kahesilindripool Süütepoolitakistus:prim aar-ja sekundaarm ähis Transistorsüütesüsteem: 0,5Ω - 2,0Ω 8 kΩ - 19kΩ Elektrooniline süütesüsteem: 0,5 – 2,0 Ω 8 k Ω - 19k Ω Digitaalne süütesüsteem: 0,3 Ω- 1 Ω 8k Ω - 15k Ω Prim aarvooluringilülitam ine Transistorsüütesüsteem: Transistorlüliti; süütejuhtplokk k...
AUTOMATISEERIMIS TEHNIKA VAHEEKSAMI KORDAMISKÜSIMUSED MES0040 1. Suhtelised ja absoluutsed koordinaadid APJ pingi programmeerimisel, nende tähistamine juhtprogrammides. Tooge näide ja joonistage skeem. AJP süsteemides on kasutusel ristkoordinaadistik, kus on koordinaatide tähised määratud vastavalt ISO nõudmistele. Liikumisi telgede suunas absoluutsetes koordinaatides tähistatakse tähtedega X, Y, Z ja suhtelistes koordninaatides U,V,W ning pöördeid ümber telgede vastavalt A, B, C. X- koordinaat paikneb alati horisontaalselt, Z koordinaat langeb kokku instrumendi teljega, treipingi puhul spindli teljega. AJP pinkide programmeerimisel kasutatakse koordinaatide etteandmiseks kaht varianti. Esimesel juhul antakse järgmise punkti koordinaadi väärtus mõõdetuna eelmisest punktist, tegemist on suhteliste koordinaatidega (kasutatakse ka terminit programmeerimine juurdekasvudena). Teisel juhul toimub koordinaati...
Masinaelementide ja peenmehaanika õppetool Kodutöö nr 2 õppeaines TUGEVUSÕPETUS I (MHE0011) Variant Töö nimetus A B Võlli tugevusarvutus väändele 3 5 Üliõpilane Üliõpilaskood Esitamise kuupäev Õppejõud 2015 Ühtlasele võllile on paigaldatud üks vedav ja neli veetavat rihmaratast. Teada on võlliga käitatavad võimsused P1 ... P4. Arvutada ühtlase võlli läbimõõt (kui võll on täis ja kui võll on õõnes), kui võll valmistatakse terasest E295 (voolepiir tõmbel y = 295 MPa) ja varuteguri nõutav väärtus [S] = 8. Painde ning võimalike pingekontsentraatorite ja väsimuse mõju on arvesse võetud nõutava varuteguri väärtuse valikul. ...
Kodutöö nr 2 õppeaines TUGEVUSÕPETUS (MES0240) Variant Töö nimetus A B Võlli arvutus väändele Üliõpilane Üliõpilaskood Esitamise kuupäev Õppejõud Ühtlasele võllile on paigaldatud üks vedav ja neli veetavat rihmaratast. Teada on võlliga käitatavad võimsused P1 ... P4. Arvutada ühtlase võlli läbimõõt (kui võll on täis ja kui võll on õõnes), kui võll valmistatakse terasest E295 (voolepiir tõmbel y = 295 MPa) ja varuteguri nõutav väärtus [S] = 8. Painde ning võimalike pingekontsentraatorite ja väsimuse mõju on arvesse võetud nõutava varuteguri väärtuse valikul. Võlli pöörlemissagedus on 500 min-1 (pööret minutis). Võlli skeem valida vastavalt üliõpilaskoodi viimasele numbrile A. Koormu...
Nimi HÜDROELEKTRIJAAMAD RÜHMATÖÖ Õppeaines: Ökoloogia ja keskkonnakaitse Mehaanikateaduskond Õpperühm: ET-11 Juhendaja: lektor Sirle Künnapas Tallinn 2012 SISUKORD SISSEJUHATUS Viimasel ajal on CO2 emissioon ning sellest tulenevalt kliimasoojenemine aktuaalseks teemaks saanud. On olemas neid, kes arvavad, et see on propaganda, neid kes leiavad, et kliima on alati muutunud ning neid kes usuvad sellesse, et tegemist on meie elutegevusest tingitud kõrvalnähuga. Teadlased analüüsisid pooluste jääst leiduvaid gaase ning kinnitasid, et tõepoolet on meie planeet läbinud 8 jääaega, kuid iialgi ei ole CO2 tase nii kõrgel olnud kui nüüd. Heitgaaside vähendamiseks ning ressursside lõppemise tõttu üritatakse üha enam panustada taastuvatesse energiaallikatesse nagu näiteks hüdroenergia. 1. MIS ON HÜDROENERGIA ,,Hüdroenergia on kõige rohkem väljakuj...
MEHAANIKA
Ühtlane sirgjooneline liikumine:
v=s/t vk=s1+s2/t1+t2
Ühtlaselt muutuv sirgjooneline liikumine:
a=v-vo/t (a)=m/s2 s=vot+at2/2 s=v2-vo2/2a
v>vo, siis a>o => kiirenev liikumine
v
Taavi Rokka EGR MIS on Egr(Exhaust Gas Recirculation)? Heitgaaside tagastussüsteem Lämmastikoksiidide (NOx) kontsentratsiooni vähendamiseks väljalaskegaasides. *(NO ja NO2; MITTE: N2O) Lämmastikoksiide tekkimine sõltub põlemistemperatuurist. Kõrge põlemistemperatuur tuleneb lahjade küttesegude põletamisest. Heitgaaside tagasijuhtimine põlemiskambrisse vähendab põlemistemperatuuri ja rõhku. http://video.about.com/autorepair/What-Is-an-EGR-Car-Valve-.htm Aja lugu jms 1970ndad (1973) Sisemine- klapiajastus Välimine- klapiga 2000K Miks? Lämmastikoksiidide vähenemine: 1. Põlemisprotsessi jahutatakse, sest tagasijuhitud heitgaas neelab soojust. 2. Hapnikukoguse vähendamine põlemiskambrisse tagasijuhitud heitgaaside tõttu. 3. Tekib vähem heitgaase. Parem jahutus* Diiselmootoritel heitgaaside tagastus kuni 65% 1. Mootori pöörlemissagedus 2. Kütuse sissepritsekogus 3. Sisseimetava õhu kogus 4. Sisseimetava õh...
Kontrolltöö nr.3D. 1.Elastse tagasisidega kaudtoimega kõigereziimse pöörlemissageduse regulaatori kinemaatiline skeem. Kaudtoimega elastse tagasisidega regulaatoreid kasutatakse seal, kus on nõutud siirdeprotsessi kiire kulgemine ja staatilise vea puudumine. 1.seadesektor 11.kolvi alumine varras; 2.seadevedru (kõigereziimne vedru); 12.servomootor; 3.tugilaager; 13.servomootori kolb; 4.vihid; 14.reguleeritav tugi; 5.varras; 15.hoob; 6.telg; 16.katarakti silinder; 7.siiber; 17.katarakti drosselklapp; 8.siibri hülss; 18.katarakti kolb; 9.drosselklapp; 19.tagasiside hoob; 10.küttelatt; 20.vedru: Automaatsüsteemi tasakaaluolekus vihtidele 4 mõjuv tsentrifugaaljõud on vastavuses seadevedru 2 pingusega ja varras 5 (võrdlev element) on rangelt fikseeritud asendis. Regulaatori kõik elemendid on paigal, servomootori kolb on fikseeritud mingis asen...
Trafod e transformaatorid Pöörlemissageduse reguleerimine on suhteliselt raske. On kasutusel erineva pöörlmissagedusega Seadmed vahelduvvoolu muundamiseks põhiliselt pinge tõstmiseks või mootoreid (lülitatakse ümber), parim viis on kasutada sagedusmuundurit (kallis). Pöörlemissuuna alandamiseks. Võimalik on ka sagedust ja baaside arvu muuta. Nt muudavad muutmiseks tuleb vahetada faasijuhtmed omavahel ära. ülekandeliini kõrgepinge tarvititele sobivaks 220V pingeks. Põhineb elektromagnetilisel induktsioonil. Võnkering Lihtsaim trafo koosneb eletrotehnilise terase lehtedest koostatud südamikust ja Koosneb poolist ja kondensaatorist. Kasutatakse kõrgsageduslike võnkumiste genereerimiseks. primaar(rakendatakse trafole antav vahelduvpinge) ja sekundaarmähisest(millelt 1) kondensaatorid saab kohe...
SÜÜTESÜSTEEMID Süütesüsteemi ülesanne on silindris oleva töösegu õigeaegne süütamine elektrisädemega. Küünla elektroodide vahel sädeme tekkitamiseks on vaja tõsta pinge üle 12 tuhande voldi. Klemm nr.15 süüte sisselülitamisel tekib pinge . Nr.1 on maandus.Kõrgepinge ehk sekundaarmähises , mille keerdude arv ulatub mitmekümne tuhandeni , tekib 10 000 80 000 V kõrgepinge. Mõnesaja keeruga madalpinge ehk primaarmähis kuumeneb rohkem ja on paigaldatud välimiseks.Induktiivne süütepool koosneb : raudsüdamikust,madalpingemähisest ja kõrgepingemähisest. Sädemetekkimine Suletud lüliti korral läbib vool madalpinge mähist ja tekitab ümber raudsüdamiku võimsa magnetvälja.Peale lüliti avanemist madalpinge pool katkeb , magnetväli kaob , kahaneb magnetväli , indutseerib madalpinge mähises 150-300 volti pinge ja kõrgepinge mähises 10 tuhat 30 tuhat volti , mis juhitakse süüteküünaltele. Pöörlemissagedus andurid Hall-andur Hall-andur koosneb sir...
Kodutöö nr 4 õppeaines TUGEVUSÕPETUS (MES0240) Variant Töö nimetus A B Võlli tugevusarvutus painde ja väände koosmõjule Üliõpilane Üliõpilaskood Esitamise kuupäev Õppejõud Ühtlasele võllile on paigaldatud kaks rihmaratast. Võlliga ülekantav võimsus on P = 5,5 kW. Väiksema rihmaratta efektiivläbimõõt on D1 = 140 mm. Arvutada ühtlase võlli läbimõõt, kui see valmistatakse terasest E335 (voolepiir tõmbel y = 325 MPa) ja varuteguri nõutav väärtus on [S] = 5. Pingekontsentraatorite ja väsimuse mõju on arvesse võetud nõutava varuteguri väärtuse valikul. Iga rihma vedava ja veetava haru tõmbejõudude F ja f seos on F 2,5f. Võlli skeem valida vastavalt üliõpilaskoodi viimasele numbrile A. Rihmarataste efektiivläbimõõtude ...
MHE0042 MASINAELEMENDID II Kodutöö nr. 1-B Variant nr. Töö nimetus: Veerelaagri valik ja arvutus A -4 B -2 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: A. Sivitski Töö esitatud: Töö parandada: Arvestatud: 23.05.2014 1 Veerelaagrite valik ja arvutus d2/2 m m Fr Ft Fa l/2 l Antud: Võlli materjal: teras C45E (ReH = 370 MPa, Rm = 630 MPa). Ülekantav pöörde...
Tallinna Tehnikaülikool Keemiatehnika Instituut Laboratoorne töö õppeaines Keemiatehnika KEMOSORPTSIOON Üliõpilased: Õppejõud: Tallinn 2014 Töö ülesanne Töö eesmärk on absorptsiooni kiirenemise teguri määramine hapniku absorptsioonil õhust naatriumsulfiti lahusesse katalüsaatori juuresolekul (kemosorptsioon). Pärast kogu sulfiti reageerimist lahustunud hapnikuga järgneb tekkinud naatriumsulfaadi lahuse edasine küllastumine hapnikuga (füüsikaline absorptsioon). Katseseadme skeem 5 6 w MODE ~230 V 10 50 2000 ...
Valemid, mis on vajalikud liikumise teema juures. Tähised kiirus s v t v kiirus t aeg s tee pikkus a kiirendus v v0 h kõrgus a kiirendus t T pöörlemisperiood r raadius l tee pikkus V ruumala 2 s v0. t at tee p liikumishulk 2 pikkus ...
Laboratoorne töö Elektrimootori võimsuse sõltuvus koormusest Töö sisu ja meetod: Töö sisu ja meetod on kirjeldatud raamatus A. Emmo ,E, Paju, V.Paju Füüsika praktikumi tööjuhendid , kirjastus Valgus 1986 lk. 78-80. Töövahendid: Katseriist elektrimootori võimsuse määramiseks, stopper, nihik. Töö käik: 1. Mõõtke rihmratta diameeter D. Selleks eemaldage ettevaatlikult lint rattalt. Kandke tulemus protokolli. 2. Asetage lint tagasi rattale. 3. Laske dünamomeetreid nii madalale, et mõlema dünamomeetri näidud võrduksid nulliga. Kui mõne dünamomeetri näit ei lähe nulli, keerake kruvi. Kui ei ole reguleeritav dünamomeeter, aga vedru on välja veninud, lahutage edaspidi vastav parand näidust. 4. Tõstke dünamomeetreid umbes 0,5N võrra. 5. Lülitage vool sisse. Kui mootor saavutab maksimaalsed pöörded, vaadake dünamomeetrite näidud. 6. Lülitage vool välja. Märkige...
Ülesanne 2 Autod ja traktorid II Mootori võimsus TA III Martin Leopard 1. Sõiduki mark: Sõiduki mark: BMW 523i 125kW 1996.a 2. Andmed: 5 N 1bar = 10 Pa = 10 2 cm 3. Arvutuskäik a) Mootori effektiivvõimsus 3 -1 VH := 2496cm pe := 11bar n := 5500min K := 2 n Peff := VH pe K Peff = 125.84 kW b) Mootori liitrivõimsus 3 VH := 1597 cm Peff PH := kW VH PH = 78.798 l c) Mootori erimass Andmete puudumise tõttu, valin mootori massi kogemuse põhjal m := 170kg m ...
Kolmefaasilise lühisrootoriga asünkroonmootor Kolmefaasilise lühisrootoriga asünkroonmootor koosneb liikumatust osast ehk staatorist, liikuvast osast ehk rootorist ja laagrikilpidest. Staator koosneb kerest ja faasimähistest. Keresse on pressitud õhukestest plekkrõngastest koosnev uuretega toru. Uuretesse on mähitud staatori faasimähised. Faasimähised tehakse isoleeritud mähisetraadist. Staatorimähiste kuus otsa viiakse välja mootori keres olevast august ja kinnitatakse klemmliistule. Klemmliistu puudumisel on juhtmeotsad lahtiselt klemmkarbis. Lahtised juhtmeotsad tähistatakse tähtedega C1 , C2 , C3, lõpud - C4, C5, C6. Rootor koosneb võllile kinnitatud südamikust ja mähisest. Rootori võllile on pressitud uuretega plekkrõngastest südamik. Lühisrootori mähis koosneb rootori uuretesse valatud alumiiniumvarrastest. Varraste otsad on üksteisega ühendatud otsarõngaste abil. Sellest ka nimetus lühisrootor. Rootori...
Pneumaatika ja Hüdraulika süsteemi võrldus. Pneumaatika. Plussid: Kättesaadavus: Õhku leidub maakeral igal pool, seega on suruõhu saamine võimalik kõikjal. Transporditavus: Suruõhku saab torustiku abil lihtsalt transportida suhteliselt kaugele, puudub vajadus töötanud suruõhu. tagasijuhtimiseks. Akumuleerimine: Paljudel juhtudel puudub vajadus kompressori kasutamiseks, sest suruõhku saab eelnevalt akumuleerida suruõhureservuaari, kust seda saab kasutada vastavalt vajadusele. Samuti saab suruõhku sel moel transportida. Temperatuur: Suruõhuseadmed on tundetud temperatuuri kõikumistele. Plahvatusohtlikkus: Suruõhu kasutamisel puudub plahvatus- ja süttimisoht, seega puudub vajadus kasutada spetsiaalseid turvavahendeid. Saastusoht: Suruõhk on puhas energiakandja; lekkivad torustikud ei saasta keskkonda, mis on eriti oluline toiduainete-, puidu-, tekstiili- ja ga...